
Hội thảo toàn quốc “Nghiên cứu ứng dụng, phát triển hạ tầng dữ liệu không gian địa lý quốc gia – Vai trò của công nghệ đo đạc bản đồ hiện đại”
Phạm Cần*, Nguyễn Ngọc Lâu**
*Công ty TNHH Tư vấn Khảo sát và Xây dựng Đại Nam,
**Bộ môn Địa Tin học – Trường Đại học Bách Khoa TP. HCM
Tóm tắt: Việc xác định vị trí tâm ảnh bằng kỹ thuật PPP giúp hạn chế các ước tính khi thực hiện công tác ghép các ảnh chụp thành khối ảnh, đồng thời giảm thiểu đáng kể số lượng điểm khống chế ảnh mặt đất (GCPs). PPP giúp giảm kinh phí cũng như khối lượng việc dành cho trạm tham chiếu mặt đất, đồng thời kỹ thuật này cũng linh động về không gian làm việc khi không cần quan tâm đến khoảng cách đến trạm tham chiếu (đây là điểm lợi thế của phương pháp định vị tuyệt đối so với phương pháp định vị tương đối). Chúng tôi tiến hành đánh giá độ chính xác khi sử dụng PPP chỉ dùng trị đo GPS và PPP dùng kết hợp GPS + GLONASS so với kỹ thuật định vị tương đối RTK (Real-time Kinematic) trên tập số liệu bay chụp với thời gian khoảng 15 phút, kết quả cho thấy khi kết hợp GPS + GLONASS độ chính xác của các thành phần hướng Bắc, hướng Đông và độ cao lần lượt là 0.022m, 0.095m và 0.072m cải thiện gần 7.8 lần so với PPP chỉ sử dụng trị đo GPS, đặc biệt thành phần hướng Bắc và độ cao cải thiện lên đến ~ 11 lần.
Từ khóa: GNSS PPP, Định vị điểm đơn chính xác, NRCAN CSRS-PPP, RTKLIB, IGS
1. ĐẶT VẤN ĐỀ
Thiết bị bay không người lái (Unmanned Aerial Vehicle – UAV) gần đây đã trở thành một nền tảng phổ biến để thu thập dữ liệu ảnh quang học vì tính chất linh hoạt, mang tính thời sự cao và chi phí thấp so với các cách thu thập dữ liệu địa lý khác. Hơn nữa, các sản phẩm như đám mây điểm dày đặc, mô hình số độ cao và ảnh trực giao hiện có thể thu được thường xuyên từ hình ảnh UAV với độ chính xác cấp độ cm thông qua một số lượng nhất định các điểm khống chế mặt đất (Ground Control Points – GCPs) có độ chính xác cao và phân bố đều [1]. Các GCPs như vậy theo truyền thống được sử dụng để xác định gián tiếp các hướng hình ảnh tuyệt đối trong quá trình xử lý tam giác trên không, thường được thực hiện thông qua việc định hướng khối ảnh theo gói. Tuy nhiên, việc thiết lập các GCPs được phân bố tốt là một việc làm tốn nhiều thời gian, chi phí và thường là khó thực hiện trong các loại địa hình đồi núi. Do đó việc giảm thiếu số lượng điểm GCPs là cần thiết.
Một trong các yếu tố chính trong việc xác định độ chính xác của các đám mây điểm được tạo ra bằng cách sử dụng tham chiếu vị trí trực tiếp (khi không có GCPs) là các vị trí máy ảnh dựa trên thiết bị GNSS gắn trên UAV. Ngoài các yếu tố định hướng mô hình, độ phân giải mặt đất (GSD), thì vị trí máy ảnh trên vật mang chính xác đến mức cm có thể hỗ trợ việc lập bình đồ ảnh với độ chính xác từng cm [1]. Định vị điểm đơn thông thường dùng trị đo mã và bản lịch truyền thông có độ chính xác 5-15m [7], nên sẽ hạn chế trong các ứng dụng lập bản đồ tỷ lệ lớn nếu muốn tối thiểu hóa các GCPs, trong khi các kỹ thuật định vị tương đối chẳng hạn như RTK (Real time Kinematic) có thể cung cấp độ chính xác ở mức mm-cm nhưng để tính toán chính xác tọa độ của tâm ảnh chụp cần thêm ít nhất một trạm cơ sở mặt đất thu đồng thời. Điều này dẫn đến tốn kinh phí và thời gian cài đặt trạm cơ sở ngoài thực địa.
Kỹ thuật định vị điểm chính xác (PPP) cung cấp một giải pháp thay thế cho các kỹ thuật định vị tương đối để xác định vị trí của máy ảnh với độ chính xác ở mức cm-dm [7]. PPP là phương pháp định vị điểm đơn, xử lý các trị đo pha và mã từ một máy thu GNSS duy nhất cùng với quỹ đạo và số hiệu chỉnh đồng hồ vệ tinh có độ chính xác cao từ bản lịch vệ tinh chính xác được cung cấp miễn phí từ Dịch vụ GNSS Quốc tế (International GNSS Service – IGS). Hạn chế chính của kỹ thuật này là phải tìm ra tham số đa trị mà không có dữ liệu bổ sung từ các trạm tham chiếu. Các nghiên cứu trước đây [1, 6] để giải tham số đa trị thành công cần một khoảng thời gian để hội tụ, thường yêu cầu ít nhất 15 đến 20 phút quan sát. Theo nghiên cứu gần đây [11], một số phương pháp giải đa trị như LAMBDA và iFlex cho phép thời gian hội tụ nhanh hơn giảm xuống chỉ còn khoảng 1 phút.
Các nghiên cứu đã chỉ ra rằng độ chính xác của PPP cải thiện khi thực hiện kết hợp trị đo của đa hệ thống vệ tinh định vị [4, 6, 11]. Hiện nay vẫn còn ít nghiên cứu cũng như đánh giá về độ chính xác của kỹ thuật PPP trên các vật mang với thời lượng bay hạn chế và tốc độ thu dữ liệu nhanh.
Nghiên cứu trong bài báo này, chúng tôi sẽ trình bày những nội dung chính sau:
Thu thập dữ liệu bằng thiết bị bay không người lái;
Tính toán tọa độ của tâm ảnh chụp bằng kỹ thuật PPP;
Cuối cùng đánh giá độ chính xác của vị trí tâm ảnh tính bằng kỹ thuật PPP so với kỹ thuật RTK.
2. THU THẬP DỮ LIỆU VÀ PHƯƠNG PHÁP NGHIÊN CỨU
2.1. Thu thập dữ liệu
Khu vực lấy mẫu nằm tại dự án khu du lịch Ánh Dương thuộc Hàm Thuận Nam, tỉnh Bình Thuận. Độ cao bay thiết kế của thiết bị bay không người lái so với mặt đất là 100m ứng với độ phân giải ảnh là 2.7cm. Chúng tôi tiến hành công tác khảo sát vào ngày 30-05-2021 bằng thiết bị Phantom4RTK của hãng DJI (xem hình 2.1) với thông số về độ chính xác mặt bằng: 1cm+1ppm, độ cao: 1.5cm+1ppm và tốc độ thu 0.2 giây. Số lượng vệ tinh quan trắc được trong thời gian khảo sát khoảng 9-12 vệ tinh GPS và 5-6 vệ tinh GLONASS.

Ngoài ra để so sánh và đánh giá độ chính xác của kỹ thuật PPP so với RTK, chúng tôi đã cài đặt một trạm tham chiếu mặt đất đặt tại điểm BASE nằm ngay trong khu vực khảo sát (hình 2.2) thu dữ liệu đồng thời với thiết bị bay không người lái bằng máy thu GNSS 2 tần số RUIDE R90I thu được cả vệ tinh GPS + GLONASS, có độ chính xác mặt bằng và độ cao tương ứng (H=0.8cm+1ppm/ V=1.5cm+1ppm) với tốc độ thu là 0.2 giây. Để đảm bảo độ chính xác của giá trị tọa độ của trạm tham chiếu chúng tôi tiến hành ghi dữ liệu tại trạm tham chiếu với thời gian dài hơn (>1 giờ) [6]. Chi tiết về công tác cài đặt cho việc thu thập dữ liệu được tóm tắt trong bảng 2.1.
Bảng 2.1 Chi tiết về công tác thu thập số liệu
| Nội dung | Thông số kỹ thuật |
| Vật mang | Phantom4RTK |
| Camera | 1” CMOS |
| Thời gian bay | 15 phút |
| Tốc độ | 0.3 m/s |
| Độ phủ | 80% |
| Độ phân giải ảnh chụp | 2.7cm |
| Số lượng tấm ảnh | 369 |
| Thời tiết | Nắng tốt |
Sơ đồ thiết kế tuyến tuyến bay, và vị trí của trạm tham chiếu mặt đất như hình 2.2.

2.2. Phương pháp nghiên cứu
Để thực hiện kỹ thuật PPP, dữ liệu đầu vào cần có trị đo giả cự ly (trị đo mã) và trị đo pha trên 2 tần số, kết hợp với bản lịch chính xác từ IGS và loại trừ các nguồn sai số khác để tiến hành
tính toán ra tọa độ tại vị trí ăng-ten của máy thu [5].
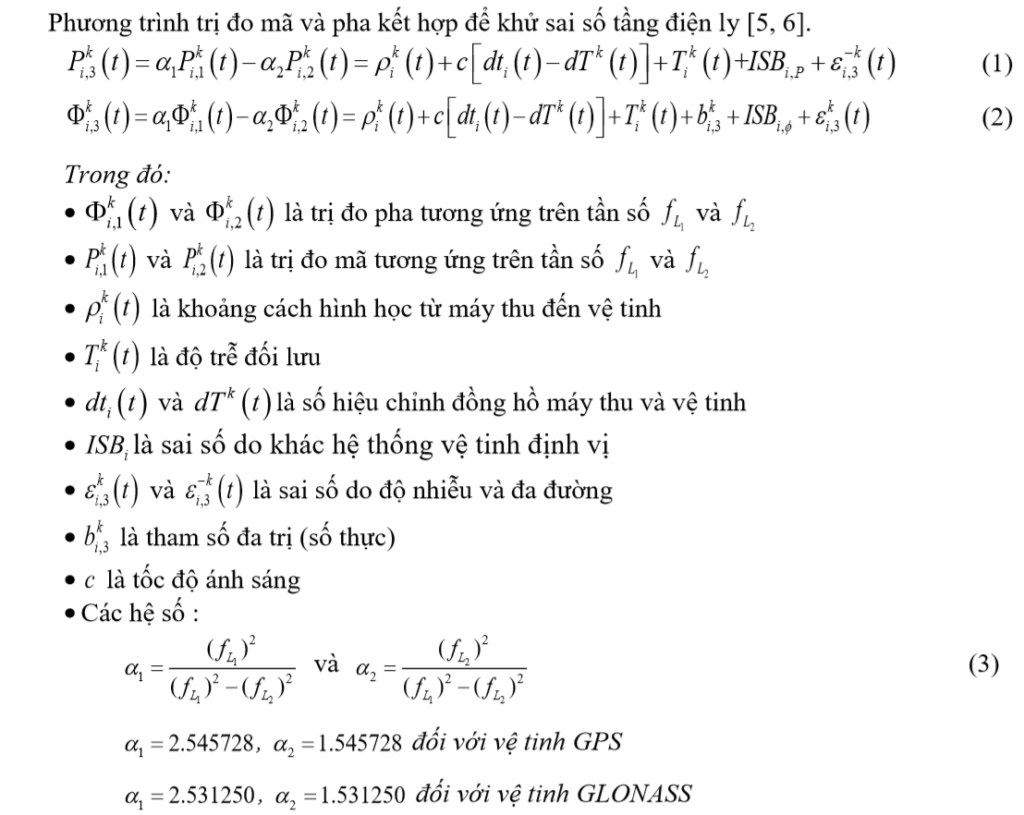
Để xử lý kết hợp GPS + GLONASS còn cầnphải đồng nhất về thang thời gian cũng như hệ tọa độ tham chiếu của hai hệ thống vệ tinh định vị [6].
Ngoài các nguồn sai số kể trên còn có:
Sai số do khác hệ thống vệ tinh định vị (Inter-System Bias – ISB) khi xử lý kết hợp GPS + GLONASS: lấy hiệu nội bộ của từng hệ thống vệ tinh định vị sẽ khử được nguồn sai số này.
Số hiệu chỉnh phase wind-up (chỉ ảnh hưởng đến trị đo pha): tính toán và hiệu chỉnh vào trị đo
pha trong định vị điểm chính xác.
Sai số do mô hình ăng-ten máy thu: tham khảo đến tâm pha trung bình của ăng-ten, bỏ qua biến động tâm pha trong quá trình xử lý PPP.
Như vậy trong phương trình (1), (2) cần xác định: các thành phần tọa độ máy thu, sai số đồng hồ máy thu, độ trễ đối lưu thiên đỉnh và tham số đa trị (số thực).
Dữ liệu thô sau khi chuyển sang định dạng RINEX chúng tôi thực hiện hai phương án xử lý PPP động (GPS PPP và GPS+GLONASS PPP) và so sánh kết quả với kỹ thuật RTK (với độ chính xác của RTK ở mức vài cm khi đạt trạng thái nghiệm fixed) nhằm đánh giá độ chính xác của các phương án xử lý PPP theo các thành phần hướng Bắc, hướng Đông và độ cao. Sơ đồ nghiên cứu tóm tắt như hình 2.3.

3. KẾT QUẢ NGHIÊN CỨU VÀ THẢO LUẬN
3.1. Các phương án xử lý PPP
Chúng tôi thực hiện xử lý PPP với giải pháp nghiệm trôi (float solution) theo hai phương án: a) chỉ dùng trị đo của vệ tinh GPS, b) kết hợp trị đo GPS+GLONASS. Các tham số cài đặt để xử lý như bảng 3.1
Bảng 3.1 Các tham số cài đặt khi xử lý PPP
| Tham số cài đặt | Nội dung |
| Độ giản cách tín hiệu (giây) | 0.2 |
| Góc cao vệ tinh (o) | 7.5 |
| Bản lịch vệ tinh | IGS Final |
| Trị đo | Pha và mã |
| Độ trễ tầng điện ly | Tổ hợp P3 và L3 |
| Độ trễ tầng đối lưu | Hàm VMF1 |
| Tham số đa trị | Nghiệm trôi (float solution) |
| Mô hình tâm pha ăng-ten | Igs14.atx |

Theo biểu đồ hình 3.1, giá trị DOP nhỏ khi số lượng vệ tinh nhiều, đồng nghĩa chúng ta có thể tiên đoán được tại một khu vực nhất định khi số lượng vệ tinh càng nhiều thì độ chính xác định vị càng cao.
3.2. So sánh và đánh giá kết quả
Bảng 3.2 Tọa độ trạm tham chiếu mặt đất trong hệ tọa độ ITRF14
| TÊN ĐIỂM | X(m) | Y(m) | Z(m) | Thời gian thu |
| BASE | -1938045.257 | 5959385.550 | 1183918.509 | 1giờ13phút30giây |
Để đánh giá độ chính xác của các phương án xử lý PPP chúng tôi dựa trên tọa độ của tập điểm xử lý bằng RTK, trong đó tọa độ trạm cơ sở mặt đất được tính toán chính xác bằng kỹ thuật Static PPP-AR (PPP tĩnh có giải đa trị) từ dịch vụ NRCAN CSRS-PPP, tọa độ của điểm BASE cho trong bảng 3.2 với độ chính xác vài cm [9]. Kết quả xử lý RTK trên phần mềm RTKLIB cho nghiệm fixed 100% với tổng cộng 4644 epoch.
Bảng 3.3 là kết quả đánh giá độ chính xác của kỹ thuật PPP so với kỹ thuật RTK theo ba thành phần: hướng Bắc, hướng Đông và độ cao theo công thức sau:

Trong đó: (N1, E1, h1) và (N2, E2, h2) tương ứng là tọa độ, độ cao xử lý bằng kỹ thuật RTK và PPP. Và n là tổng số epoch so sánh
Bảng 3.3 Đánh giá độ chính xác của kỹ thuật PPP so với kỹ thuật RTK
| Phương pháp xử lý | Hướng Bắc (m) | Hướng Đông (m) | Độ Cao (m) |
| GPS PPP | ±0.250 | ±0.439 | ±0.788 |
| GPS+GLN PPP | ±0.022 | ±0.093 | ±0.072 |
| Độ chính xác cải thiện | 11.3 lần | 4.7 lần | 10.9 lần |


Hình 3.2: Đồ thị biểu diễn độ lệch các thành phần tọa độ của PPP so với RTK theo thời gian a) chỉ dùng trị đo của vệ tinh GPS; b) kết hợp trị đo GPS + GLONASS
Dựa vào đồ thị Hình 3.2, ta có thể thấy được sai số hệ thống trong kết quả định vị PPP, đặc biệt là trường hợp chỉ sử dụng trị đo GPS, cụ thể là (0.2, 0.4 và 0.8) m tương ứng với hướng Bắc, hướng Đông và độ cao rất có thể đây là ảnh hưởng của việc không giải tham số đa trị (xem đa trị là số thực) gây ra. Đây cũng là một thách thức trong định vị PPP và là hạn chế cố hữu của định vị GPS trên các nền tảng thiết bị không người lái chuyển động với tốc độ cao và thời gian thu dữ liệu ngắn [1].
Bảng 3.3 chỉ ra rằng, độ chính xác khi kết hợp GPS + GLONASS cải thiện vượt trội so với PPP chỉ dùng trị đo GPS, đặt biệt ở thành phần hướng Bắc và độ cao. Lý do số lượng vệ tinh GPS + GLONASS nhiều hơn GPS, Kết quả này cho thấy vai trò của trị đo GNSS dư đối với kết quả PPP động trên trên nền tảng thiết bị chuyển động nhanh như UAV.
4. KẾT LUẬN
Chúng tôi đã khảo sát độ chính xác của các phương án xử lý PPP so với RTK trên tập số liệu bay chụp vào ngày 30-05-2021. Cuối cùng đưa ra các nhận xét như sau:
Độ chính xác khi xử lý PPP chỉ dùng trị đo GPS là 0.250, 0.439 và 0.788 (m) còn PPP dùng kết hợp GPS + GLONASS có thể đạt được 0.022, 0.095 và 0.072 (m) tương ứng theo hướng Bắc, hướng Đông và độ cao (khi bỏ qua sai số kết quả của RTK).
Việc kết hợp trị đo GPS và GLONASS trong xử lý PPP đã cải thiện độ chính xác đáng kể khi tốc độ thu dữ liệu nhanh trên thiết bị bay không người lái. So với khi xử lý chỉ dùng trị đo GPS, độ chính xác này cải thiện đến 7.8 lần, đặc biệt ở thành phần hướng Bắc và độ cao cải thiện lên đến ~11 lần.
Tóm lại, độ chính xác PPP trong giải pháp nghiệm trôi phụ thuộc nhiều vào số lượng trị đo dư. Điều này chứng tỏ việc sử dụng đa hệ thống vệ tinh định vị trong kỹ thuật PPP là cần thiết để cải thiện độ chính xác. Ngoài ra sai số về độ cao cũng bị ảnh hưởng ít nhiều bởi sự lệch pha ăng-ten khi chưa được mô hình hóa chính xác.
Độ chính xác của PPP đạt được có thể hỗ trợ cho công tác lập bình đồ ảnh, mang lại những lợi ích đáng kể như giảm số lượng điểm GCPs, loại bỏ thao tác vận hành liên quan đến trạm tham chiếu mặt đất, đồng thời chúng ta cũng không cần quan tâm đến tầm bay xa giới hạn của thiết bị không người lái. Vì vậy PPP phù hợp cho các ứng dụng khi kết hợp với thiết bị bay không người lái để bay chụp ở các khu vực núi cao hoặc môi trường có khí hậu khắc nghiệt, nơi mà việc lập các GCPs và việc lắp đặt trạm tham chiếu mặt đất khó thực hiện hoặc thậm chí nguy hiểm.
TÀI LIỆU THAM KHẢO
[1] Ben GRAYSON, Nigel T. PENNA, Jon P. MILLS, Darion S. GRANT, “GPS Precise Point Positioning for UAV Photogrammetry,” The Photogrammetric Record Volume 33, Issue 164, December 2018.
[2] JasonN.Gross, RyanM.Watson, StéphaneD’Urso, and YuGu, “Flight-Test Evaluation of Kinematic Precise Point Positioning of Small UAVs,” International Journal of Aerospace Engineering, Volume 2016, Article ID 1259893.
[3] Bikram Parajuli, Masters in Cartography & Geographical Information Engineering, LIESMARS “Performance Analysis of Different Positioning Modes in RTKLIB Software,” Technical Report, January 2020.
[4] Byung-Kyu Choi, Kyoung-Min Roh, Sang Jeong Lee, “Development of a Combined GPS/GLONASS PPP Method,” Journal of Positioning, Navigation, and Timing – JPNT 3(1), 31-36 (2014).
[5] Nguyen Ngoc Lau, Pham Can, “Improving Accuracy of Real Time Kinematic Positioning by Using PPP with IGS-RTS Corrections,” International Symposium on Geoinformatics for Spatial Infrastructure Development in Earth and Allied Sciences 2018.
[6] Nguyen Ngoc Lau, Ho Chi Minh City University of Technology, “Point Precise Positioning Using GPS and GLONASS Measurements,” Publication in Journal of Geodesy and Cartography, No. 15 – March 2013.
[7] Nguyen Ngoc Lau, Pham Can, “Accuracy Assessment of the Precise Point Positioning Using The IGS Real-Time Corrections,” Publication in Journal of Geodesy and Cartography, September 2018.
[8] Pham Can, Nguyen Ngoc Lau, “Research on Application of RTPPP for the Hydrographic Surveying in Vietnam,” the FIG Working Week 2019 in Hanoi, Vietnam 22-26 April 2019.
[9] Nguyen Ngoc Lau, Tran Trong Duc, Duong Tuan Viet, Dang Van Cong Bang, “Automatic GPS precise point processing via Internet,” Report of ministry level project B2010-30-33, 2010.
[10] 07/2021/TT-BTNMT “Quy định kỹ thuật thu nhận và xử lý dữ liệu ảnh số từ tàu bay không người lái phục vụ xây dựng, cập nhật cơ sở dữ liệu nền địa lý quốc gia tỷ lệ 1:2.000, 1:5.000 và thành lập bản đồ địa hình tỷ lệ 1:500, 1:1.000.”
[11] Tuan Viet Duong, “Precise Point Positioning with ambiguity resolution using multi-frequency multi-constellation GNSS measurements,” Thesis for: Doctor of Philosophy (PhD), RMIT University, 2020.