
• Phạm Cần
University of Technology, VNU-HCM
(Manuscript Received on September 15th, 2017, Manuscript Revised October 09th, 2017)
TÓM TẮT:
Độ chính xác của quỹ đạo và đồng hồ vệ tinh là yếu tố quan trọng nhất trong việc nâng cao độ chính xác của định vị điểm đơn thời gian thực. Chúng tôi đã khảo sát độ chính xác của số hiệu chỉnh về quỹ đạo và đồng hồ vệ tinh GPS nhận được từ dịch vụ IGS thông qua internet. Dựa vào độ chính xác của các thông tin đã khảo sát cho thấy độ chính xác về quỹ đạo của các vệ tinh GPS sau khi đã được hiệu chỉnh trung bình khoảng 0.3m, trong khi độ chính xác về số hiệu chỉnh đồng hồ của các vệ tinh GPS khoảng 1.2ns.
1. GIỚI THIỆU
Kể từ năm 1994 đến nay, cộng đồng người dùng GNSS đã hưởng lợi từ các sản phẩm chính xác được cung cấp bởi dịch vụ IGS (International GNSS Service). Các sản phẩm này tham khảo đến khung tham chiếu ITRF có độ chính xác đến mức cm [3, 10] và đảm bảo sự ổn định cao. Tuy nhiên người dùng phải mất khoảng thời gian chờ đợi xấp xỉ 18 ngày mới nhận được sản phẩm cuối cùng (bản lịch IGS Final). Vì vậy các kết quả định vị điểm đơn chính xác cao thường là các kết quả hậu xử lý.
Bắt đầu từ 04/2013, góp phần vào việc nâng cao độ chính xác trong định vị tuyệt đối thời gian thực, tổ chức IGS đã hỗ trợ người dùng thông qua dịch vụ truyền các số hiệu chỉnh về quỹ đạo và đồng hồ vệ tinh GNSS theo thời gian thực (RTS – Real time service). Các số hiệu chỉnh này được định dạng theo tiêu chuẩn RTCM-SSR [8, 14] và được phát sóng trực tiếp đến người dùng thông qua giao thức internet. Đây được coi như là nguồn hiệu chỉnh tin cậy vào các thông tin nhận được từ bản lịch truyền thông (bản lịch quảng bá). Cũng chính vì vậy mà đây là dấu hiệu rất lạc quan đáng để chúng ta quan tâm trong xu thế nâng cao độ chính xác trong định vị vệ tinh như hiện nay.
Trong bài báo này chúng tôi sẽ trình bày phương pháp hiệu chỉnh các số hiệu chỉnh quỹ đạo và đồng hồ vệ tinh GPS nhận từ dịch vụ RTS vào quỹ đạo và đồng hồ vệ tinh GPS tính toán từ bản lịch truyền thông GPS. Khảo sát và đánh giá độ chính xác của quỹ đạo và đồng hồ vệ tinh GPS sau khi đã được hiệu chỉnh.

2. PHƯƠNG PHÁP HIỆU CHỈNH QUỸ ĐẠO VÀ ĐỒNG HỒ VỆ TINH GPS
Quỹ đạo và đồng hồ các vệ tinh GPS tính từ các tham số của bản lịch truyền thông có độ chính xác không cao. Vậy nên kết quả của định vị điểm đơn dựa trên cơ sở quỹ đạo và đồng hồ vệ tinh GPS tính toán từ bản lịch truyền thông chỉ đáp ứng cho các ứng dụng yêu cầu độ chính xác không cao như định vị hay dẫn đường thông thường. Chính vì vậy để nâng cao độ chính xác của định vị điểm đơn thời gian thực điều quan trọng nhất là cải thiện độ chính xác của quỹ đạo và đồng hồ vệ tinh.
2.1. Công thức hiệu chỉnh quỹ đạo vệ tinh
2.2. Công thức hiệu chỉnh số hiệu chỉnh đồng hồ vệ tinh
3. THU THẬP VÀ XỬ LÝ SỐ LIỆU
Dữ liệu sử dụng để thực hiện khảo sát là bản lịch truyền thông GPS và số hiệu chỉnh về quỹ đạo và đồng hồ vệ tinh GPS nhận được từ dịch vụ RTS trong các ngày 160, 183 và 188 của năm 2017. Bản lịch chính xác dùng làm cơ sở để thực hiện các so sánh là bản lịch IGS Final của cùng ngày. Theo [7] độ chính xác của bản lịch IGS Final chỉ ở mức 2.5cm về quỹ đạo và 0.075ns về đồng hồ.
Quỹ đạo vệ tinh GPS tính toán từ bản lịch truyền thông tham khảo đến tâm pha anten vệ tinh, trong khi đó quỹ đạo nhận được từ bản lịch chính xác lại tham khảo đến trọng tâm của vệ tinh. Cho nên để thực hiện sự so sánh chúng tôi cần chuyển một trong hai về cùng vị trí tham khảo. Vì trị đo khoảng cách là giá trị tính từ tâm pha anten vệ tinh đến tâm pha anten máy thu, cho nên để thuận tiện cho quá trình so sánh các kết quả định vị điểm đơn sau này chúng tôi đã thực hiện việc chuyển đổi bản lịch chính xác về tâm pha anten vệ tinh GPS trước khi thực hiện sự so sánh.
Để nhận được các số hiệu chỉnh về quỹ đạo và đồng hồ vệ tinh GPS từ dịch vụ RTS, người dùng cần đăng ký một tài khoản trên website https://register.rtcm-ntrip.org. Sau khi đăng ký xong người dùng sẽ nhận được một User-Name cùng với Password tương ứng để có thể lấy các số hiệu chỉnh thời gian thực từ dịch vụ RTS.
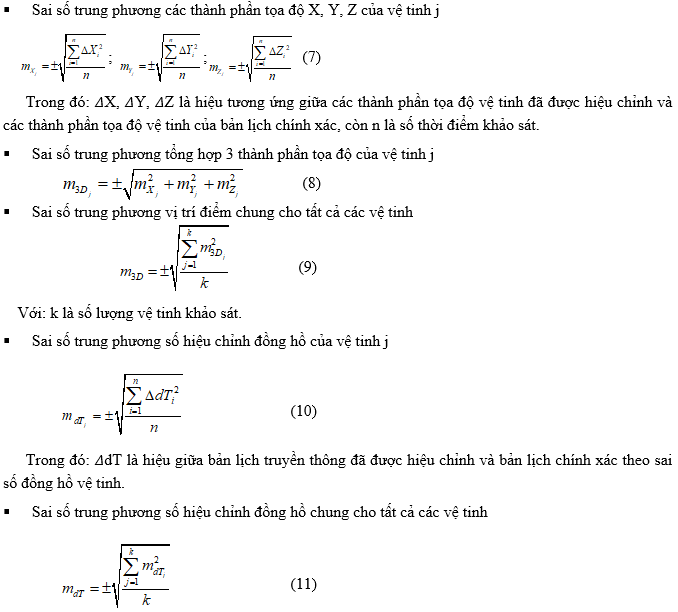
Trong bài báo này, chúng tôi sử dụng các số hiệu chỉnh quỹ đạo và đồng hồ vệ tinh GPS được truyền từ IGS mount-point ID: IGS01. Các số hiệu chỉnh này cập nhật cứ 5 giây một lần. Trong khi đó, bản lịch IGS Final lại cho tọa độ và sai số đồng hồ vệ tinh cứ 15 phút một lần. Nhằm tránh sai số do nội suy từ bản lịch chính xác cho những thời điểm không được cho trong bản lịch chính xác, chúng tôi chỉ so sánh quỹ đạo và đồng hồ vệ tinh GPS với bản lịch chính xác ở những thời điểm 15 phút chẵn trong ngày để kết quả đánh giá mang tính khách quan nhất. Để đánh giá độ chính xác chúng tôi tiến hành tính sai số trung phương các thành phần tọa độ vệ tinh mX, mY, mZ, sai số trung phương vị trí điểm tổng hợp m3D, và sai số trung phương của số hiệu chỉnh đồng hồ vệ tinh mdT theo các công thức sau:
4. PHÂN TÍCH VÀ ĐÁNH GIÁ KẾT QUẢ
Bảng 1. Tổng hợp kết quả đánh giá độ chính xác quỹ đạo và đồng hồ vệ tinh GPS đã hiệu chỉnh (DOY: ngày của năm)
|
DOY |
Chưa hiệu chỉnh RTS |
Đã hiệu chỉnh RTS |
Mức cải thiện |
|||
|
m3D (m) |
mdT (ns) |
m3D (m) |
mdT (ns) |
Quỹ đạo |
Đồng hồ |
|
|
160 |
1.324 | 2.584 | 0.319 | 0.491 | 76% | 81% |
|
183 |
1.559 | 2.540 | 0.266 | 1.294 | 83% | 49% |
| 188 | 1.380 | 4.890 | 0.290 | 1.946 | 79% |
60% |
| TB | 1.421 | 3.338 | 0.292 | 1.244 | 79% |
63% |
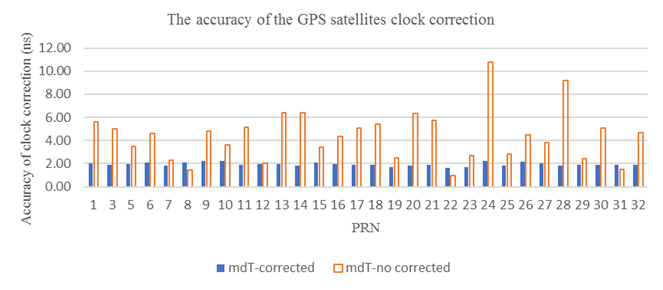
Dựa vào kết quả đánh giá tổng hợp ở bảng 1, độ chính xác về quỹ đạo vệ tinh GPS sau khi hiệu chỉnh trung bình khoảng 0.3m, còn độ chính xác về đồng hồ vệ tinh GPS trung bình khoảng 1.2ns. Ngoài ra, theo kết quả khảo sát chi tiết cho từng vệ tinh được thể hiện tại đồ thị ở hình 3 và hình 4, chúng tôi nhận thấy rằng sai số về quỹ đạo và đồng hồ vệ tinh GPS là không đồng đều.
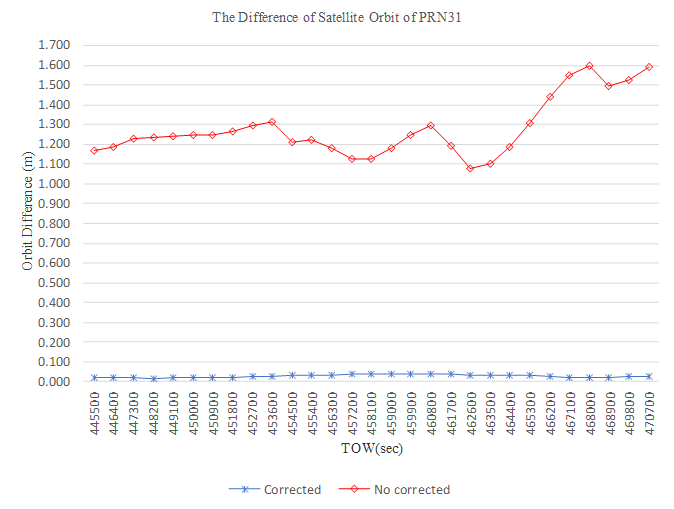
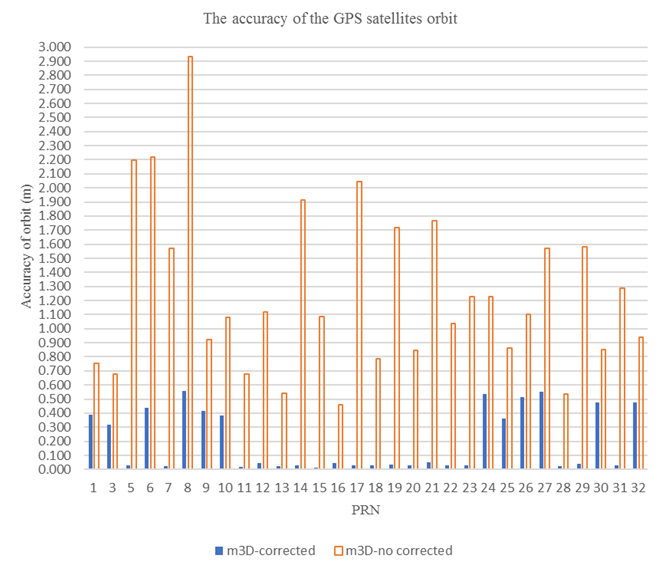
Các vệ tinh PRN (02, 05, 07, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 28, 29, 31) có sai số quỹ đạo nhỏ hơn 0.05m. Trong khi đó, quỹ đạo của các vệ tinh GPS còn lại xuất hiện sai số hệ thống dao động từ 0.3m đến 0.5m. Mặt khác các vệ tinh có sai số lớn này cũng không nằm trong vùng ảnh hưởng của bóng râm (eclipse shadow) như đã từng được thông báo trong bài báo [13].
Theo cấu hình hiện tại của hệ thống GPS thì các vệ tinh có sai số quỹ đạo tốt tập trung vào các vệ tinh GPS Block IIR và Block IIR-M, còn các vệ tinh có sai số quỹ đạo lớn đều là các vệ tinh GPS Block IIF. Điều này cho thấy rằng sai số quỹ đạo tùy thuộc vào loại vệ tinh GPS và nhiều khả năng là mô hình sai số của anten. Tuy nhiên, vấn đề này cần phải nghiên cứu và đánh giá thêm để đi đến kết luận chính xác.
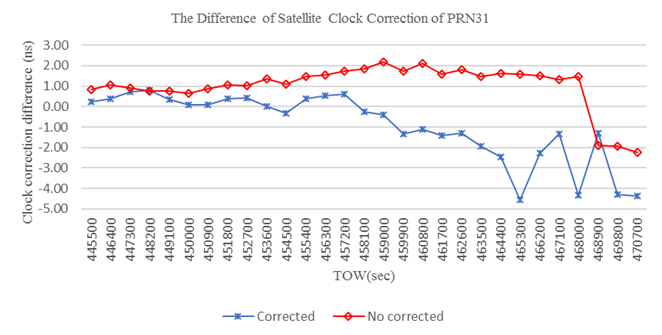
Độ chính xác về đồng hồ vệ tinh GPS cũng không ổn định và xuất hiện sai số hệ thống ở các ngày khảo sát: 160, 183, và 188. Dựa vào bảng 1 và đồ thị ở hình 2, sai số về đồng hồ vệ tinh xuất hiện các bước nhảy đột ngột, mức độ khác biệt dao động đến 0.7ns (~0.21m). Theo [13] giải thích điều này là do việc chỉnh sửa đồng hồ vệ tinh sẽ gây ảnh hưởng và làm suy giảm chất lượng của các số hiệu chỉnh đồng hồ vệ tinh thời gian thực.
5. KẾT LUẬN
Chúng tôi đã trình bày quá trình khảo sát độ chính xác của quỹ đạo và đồng hồ vệ tinh GPS sau khi đã được chúng tôi hiệu chỉnh từ các số hiệu chỉnh nhận được từ dịch vụ RTS. Dùng chương trình khảo sát do chúng tôi viết bằng ngôn ngữ lập trình MATLAB để đánh giá. Kết quả đánh giá cho thấy rằng:
Độ chính xác về quỹ đạo của tất cả các vệ tinh GPS sau khi hiệu chỉnh khoảng 0.3m, độ chính xác về đồng hồ vệ tinh GPS sau khi được hiệu chỉnh khoảng 1.2ns cải thiện hơn đến 79% về quỹ đạo và 63% về đồng hồ vệ tinh tính từ bản lịch truyền thông GPS.
Dựa vào các thông tin khảo sát trên và đồng thời căn cứ vào mối quan hệ giữa sai số vị trí điểm và sai số quỹ đạo vệ tinh thông qua giá trị PDOP theo công thức kinh nghiệm sau:
sai số vị trí = PDOP*(sai số quỹ đạo vệ tinh);
Từ đó chúng ta có thể dự báo rằng, với giá trị PDOP trung bình khoảng 2 thì định vị điểm đơn khi sử dụng quỹ đạo và đồng hồ vệ tinh sau khi đã hiệu chỉnh bởi các số hiệu chỉnh nhận được từ dịch vụ RTS sẽ cho kết quả định vị có sai số vị trí điểm ở mức xấp xỉ 0.6m, kết quả này tốt hơn nhiều so với định vị điểm đơn dùng bản lịch truyền thông. Đây là dấu hiệu lạc quan cho chúng ta khi thực hiện định vị điểm đơn chính xác thời gian thực.
Theo các công bố của tổ chức IGS (http://rts.igs.org) độ chính xác của số hiệu chỉnh thời gian thực về quỹ đạo và đồng hồ vệ tinh GPS tương ứng là 0.05m và 0.3ns. Công bố này chỉ phù hợp với kết quả khảo sát của chúng tôi đối với các vệ tinh GPS Block IIR và Block IIR-M. Đồng thời với công bố này của IGS, độ chính xác của các số hiệu chỉnh RTS lại tốt hơn cả bản lịch Ultral-Rapid (predicted half), với độ chính xác về quỹ đạo và đồng hồ tương ứng 0.05m và 3ns.
Các số hiệu chỉnh RTS được truyền tải đến người dùng thông qua mạng internet, do đó việc lấy các số hiệu chỉnh RTS về quỹ đạo và đồng hồ vệ tinh phụ thuộc rất nhiều vào chất lượng đường truyền của mạng internet. Nếu gặp bất kỳ sự cố nào về chất lượng đường truyền internet thì cũng sẽ làm gián đoạn đối với việc nhận các số hiệu chỉnh này. Chính vì vậy, mối quan hệ giữa độ trễ tín hiệu và độ chính xác định vị cũng là vấn đề đáng để quan tâm khi thực hiện định vị điểm đơn chính xác cao thời gian thực.
Estimating the precision of the IGS real time GPS satellites orbit and clock corrections
- Nguyen Ngoc Lau
- Pham Can
University of Technology, VNU-HCM
(Manuscript Received on September 15th, 2017, Manuscript Revised October 09th, 2017)
ABSTRACT:
The satellites orbit and clock precision are the most important factors in improving the accuracy of real-time single point positioning. We have estimated the precision of the GPS satellites orbit and clock corrections received from the IGS service via internet network. Based on the estimated precision of the satellites orbit and clock corrected, it has been shown that the precisions of the GPS satellites orbit are about 0.3m, while the precisions of the GPS satellite clock corrections are about 1.2ns.
Key words: IGS RTS, RT-PPP, Real-time orbit and clock correction.
TÀI LIỆU THAM KHẢO
[1]. Mingyu Kimand, “Jeongrae Kim, Predicting IGS RTS Corrections Using ARMA Neural Networks,” June 2015.
[2]. Junbo Shi, Chaoquian Xu, Jiming Guo, Yang Gao, “A Performance Analysis of Real-Time Precise Point Positioning for Deformation Monitorin,” September 2013.
[3]. Nguyen Ngoc Lau, Hochiminh City University of Technology, “How Accuracy GPS Precise Point Positioning Can Be Achieved,” Science & Technology Development., Vol. 12, No. 08 – 2009.
[4]. Nguyen Ngoc Lau, Hochiminh City University of Technology, “Point Precise Positioning Using GPS and GLONASS Measurements,” Journal of Geodesy and Cartography, No. 15 – March 2013.
[5]. Anja HeBelbarth, Hambert Wanninger, “SBAS Orbit and Satellite Clock Corrections for Precise Point Positioning,” GPS Solutions, Springer Berlin / Heidelberg, 25 Sepember 2012.
[6]. Thomas Grinter, Craig Roberts, “Real Time Precise Point Positioning: Are We There Yet,” International Global Navigation Satellite Systems Society, IGNSS Symposium 2013.
[7]. Junbo Shi, Chaoqian Xu, Jiming Guo, and Yang Gao, “Real-Time GPS Precise Point Positioning-Based Precipitable Water Vapor Estimation for Rainfall Monitoring and Forecasting,” IEEE Transactions on Geoscience and RemoteSensing, June 2015.
[8]. Martin Schmitz, “RTCM State Space Representation Messages, Status and Plans,” PPP-RTK & Open Standards Symposium, March 12-13, 2012, Frankfurt, Germany.
[9]. Mark Caissy, Georg Weber, Loukis Agrotis, Gerhard Wubbena, and Manuel Hernandez-Pajares, “The Development of Real-time IGS Correction Products for Precise Point Positioning,” The IGS Real-time Pilot Project.
[10]. Jan Kouba, Geodetic Survey Division Natural Resources Canada, “A GUIDE TO USING INTERNATIONAL GNSS SERVICE (IGS) PRODUCTS,” Updated September 2015.
[11]. Andrea Sturze, Leos Mervart, Wolfgang Sohne, Georg Weber, Gerhard Wubbena, “Real-Time PPP using open CORS Networks and RTCM Standards,” 3rd International Conference on Machine Control & Guidance, March 27-29, 2012.
[12]. Mohamed Abdelazeem, Rahmi N. Celik and Ahmed El-Rabbany, “An Enhanced Real-Time Regional Ionospheric Model Using IGS Real-Time Service (IGS-RTS) Products,” The Journal of Navigation (2016).
[13]. Tomasz Hadas – Jaroslaw Bosy, “IGS RTS precise orbits and clocks verification and quality degradation over time,” GPS Solution (2015).
[14]. Tomoji Takasu, Tokyo University of Marine Science and Technology, “Real-time PPP with RTKLIB and IGS real-time satellite orbit and clock,” IGS Workshop (2010).
[15]. Jason Zhang, Kefei Zhang, Ron Grenfell, Rod Deakin, “GPS Satellite Velocity and Acceleration Determination using the Broadcast Ephemeris,” Journal of Navigation (2006).
[16]. Min-Wook Kang, Jihye Won, Mi-So Kim, Kwan-Dong Park, “Accuracy Evaluation of IGS-RTS Corrections to Stand-Alone Positioning Based on GPS Code-Pseudorange Measurements,” Journal of Positioning, Navigation, and Timing, May 2016.